Pattern Recognition and Bioinformatics
| Martin-Luther-Universität Halle |
|
|
|
Institute of Computer Science
Pattern Recognition and Bioinformatics |
AViSMo is an integrated system for memorizing visual data. Its primary goal is to provide some kind of visual
memory, e.g. to interactive systems that use active cameras for exploration tasks and gather large amounts
of visual data that cannot or shall not be processed immediately. AViSMo is based on mosaic images. A mosaic image is
generated by stitching together all images of a sequence, thus eliminating redundancies and actually reducing the
amount of data to be processed. AViSMo supports online- as well as offline-mosaicing.
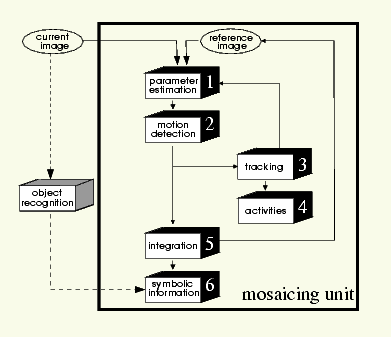
Although the main focus of AViSMo is placed on representing iconic data, additionally symbolic data (e.g object
recognition results) can be attached to the mosaics. Furtheron, since robust mosaicing of arbitrary sequences requires
some sort of motion detection, AViSMo provides information about moving objects (e.g. trajectories) and as
well some kind of low-level interpretation of detected movements. Altogether this yields a complete scene representation.
The system itself consists of different modules mostly independent of each other. Single algorithms can easily be replaced
and extensions added comfortably. Since AViSMo has been developed using a client-server approach, it can run stand-alone
or easily be integrated into existing frameworks.
System Overview:
The system consists of several modules mostly independent of each other.
Communication: Client-Server-Architecture
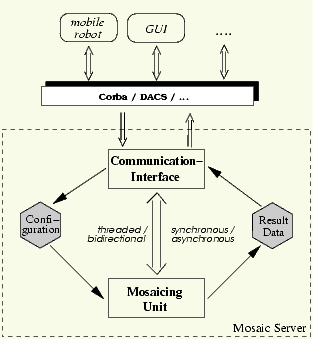 AViSMo uses a client-server architecture that is able to run in a variety of circumstances. Clients can be e.g. a mobile robot, a graphical
user interface or an interactive system. Communication with the Mosaic Server happens through the Communication Interface and is
quite flexible. The system can run in its own thread or embedded, waiting to receive and transmit all results or unsynchronized.
Currently we use a CORBA interface or direct C++ function calls but any other method can easily be added. AViSMo has been
implemented on a linux system using C++ and sometimes utilizes the
gnu scientific library for mathematical calculations.
AViSMo uses a client-server architecture that is able to run in a variety of circumstances. Clients can be e.g. a mobile robot, a graphical
user interface or an interactive system. Communication with the Mosaic Server happens through the Communication Interface and is
quite flexible. The system can run in its own thread or embedded, waiting to receive and transmit all results or unsynchronized.
Currently we use a CORBA interface or direct C++ function calls but any other method can easily be added. AViSMo has been
implemented on a linux system using C++ and sometimes utilizes the
gnu scientific library for mathematical calculations.
Current Work and Future Extensions:
Related Publications:
|
|
B. Möller, Denis Williams and S. Posch.
"Robust Image Sequence Mosaicing". In B. Michaelis, editor, Pattern Recognition, Proc. of 25th DAGM Symposium, LNCS 2781, pp. 386-393, Magdeburg, Germany, September 2003. |
|
|
D. Williams, B. Möller and S. Posch.
"Integrated System for a Visual Memory based on Mosaics". In Proc. of 2003 International Conference on Imaging Science, Systems, and Technology (CISST'03), pp. 633-639, Las Vegas, Nevada, USA, June 2003. |
|
|
B. Möller and S. Posch.
"Analysis of Object Interactions in Dynamic Scenes". In L. van Gool, editor, Pattern Recognition, Proc. of 24th DAGM Symposium, LNCS 2449, pp. 361-369, Zurich, Switzerland, September 2002. [PDF] |
|
B. Möller and S. Posch.
"Detection and Tracking of Moving Objects for Mosaic Image Generation". In B. Radig and S. Florczyk, editors, Pattern Recognition, Proc. of 23rd DAGM Symposium, LNCS 2191, pp. 208-215, Munich, Germany, September 2001. [PDF] |
Contact:
For any questions, comments or further suggestions, or if you would like to get an up-to-date version of our software, please sent an email:
Birgit Möller (moeller@informatik.uni-halle.de), Denis Williams (williams@informatik.uni-halle.de), Stefan Posch (posch@informatik.uni-halle.de)
| Martin-Luther-Universität Halle |
|
| Author Prof. Dr.-Ing. Stefan Posch | last update: 25-Jan-06 |